
ROBOT-BICHOS ANALÓGICOS I
a) Introducción:
En el artículo anterior, ya comenté que una forma alternativa y muy económica de acercar a los alumnos hacia la robótica es construyendo un artefacto móvil de reducidas dimensiones y que se apoya directamente sobre los ejes de sus motores (previamente forrados con la funda de plástico de un cable eléctrico grueso) para desplazarse.
Ahora la propuesta consistirá en lograr que los robot-bichos puedan funcionar de un modo autónomo modificando la dirección de giro de sus motores ante la presencia de luz, humedad o contacto en su entorno próximo; utilizando una linterna, una línea de agua o la presión de los dedos, podremos forzar su rastreo.
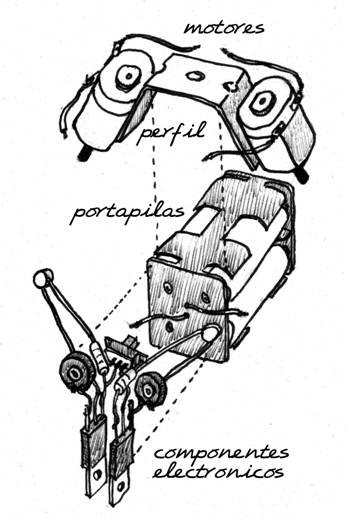
Para la construcción de los robot-bichos analógicos bastará con disponer de dos motores con caras planas, un trozo de perfil plano perforado de aluminio y de uno o dos portapilas pegados, según los casos. La incorporación sobre el portapilas “motorizado” de unos pocos dispositivos electrónicos (transistores, resistencias o condensadores) dotarán al insectoide de una sensibilidad acusada a variables físicas externas. Su aspecto queda definido por la inspiración que nos proporcionan los insectos terrestres: el portapilas hace de abdomen, los motores de tórax, los transistores de mandíbulas y los condensadoreses o las resistencias de antenas.
ROBOTICA DIGITAL
La robótica es la ciencia y la tecnología de los robots. Se ocupa del diseño, manufactura y aplicaciones de los robots.[1] [2] La robótica combina diversas disciplinas como son: la mecánica, la electrónica, la informática, la inteligencia artificial y la ingeniería de control.[3] Otras áreas importantes en robótica son el álgebra, los autómatas programables y las máquinas de estados.
El término robot se popularizó con el éxito de la obra RUR (Robots Universales Rossum), escrita por Karel Capek en 1920. En la traducción al inglés de dicha obra, la palabra checa robota, que significa trabajos forzados, fue traducida al inglés como robot.
historia de la robótica ha estado unida a la construcción de "artefactos", que trataban de materializar el deseo humano de crear seres a su semejanza y que lo descargasen del trabajo. El ingeniero español Leonardo Torres Quevedo (GAP) (que construyó el primer mando a distancia para su automóvil mediante telegrafía sin hilo, el ajedrecista automático, el primer transbordador aéreo y otros muchos ingenios) acuñó el término "automática" en relación con la teoría de la automatización de tareas tradicionalmente asociadas a los humanos.
Karel Čapek, un escritor checo, acuñó en 1921 el término "Robot" en su obra dramática "Rossum's Universal Robots / R.U.R.", a partir de la palabra checa robota, que significa servidumbre o trabajo forzado. El término robótica es acuñado por Isaac Asimov, definiendo a la ciencia que estudia a los robots. Asimov creó también las Tres Leyes de la Robótica. En la ciencia ficción el hombre ha imaginado a los robots visitando nuevos mundos, haciéndose con el poder, o simplemente aliviando de las labores caseras.
El término robot se popularizó con el éxito de la obra RUR (Robots Universales Rossum), escrita por Karel Capek en 1920. En la traducción al inglés de dicha obra, la palabra checa robota, que significa trabajos forzados, fue traducida al inglés como robot.
historia de la robótica ha estado unida a la construcción de "artefactos", que trataban de materializar el deseo humano de crear seres a su semejanza y que lo descargasen del trabajo. El ingeniero español Leonardo Torres Quevedo (GAP) (que construyó el primer mando a distancia para su automóvil mediante telegrafía sin hilo, el ajedrecista automático, el primer transbordador aéreo y otros muchos ingenios) acuñó el término "automática" en relación con la teoría de la automatización de tareas tradicionalmente asociadas a los humanos.
Karel Čapek, un escritor checo, acuñó en 1921 el término "Robot" en su obra dramática "Rossum's Universal Robots / R.U.R.", a partir de la palabra checa robota, que significa servidumbre o trabajo forzado. El término robótica es acuñado por Isaac Asimov, definiendo a la ciencia que estudia a los robots. Asimov creó también las Tres Leyes de la Robótica. En la ciencia ficción el hombre ha imaginado a los robots visitando nuevos mundos, haciéndose con el poder, o simplemente aliviando de las labores caseras.
No hay comentarios:
Publicar un comentario